Robot Calibration by SprutCAM 소개
MachineMaker 2.0을 사용한 로봇 교정 작업
도구 위치에 대한 데이터를 MachineMaker 2.0으로 자동 전송하는 앱입니다.
로봇 교정은 다음 유형의 로봇에 대한 TCP 교정을 지원합니다.
- 화낙
- 쿠카
- 토르마크
- 보룬테
- CRP
- 덴소
- 두봇
- 에스툰
- 하이윈
- 현대
- 모토맨
- 뉴커
- 마누텍
- 나치
- OTC 다이헨
- 토리노
작동 방식:
- MachineMacker 2.0에서 QR 코드를 스캔하여 앱을 프로젝트와 연결하세요.
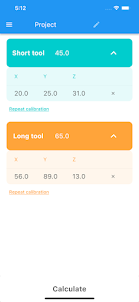
- 로봇의 TCP 데이터를 수집합니다. 먼저 짧은 도구를 사용한 다음 긴 도구를 사용합니다.
- XYZ 판독값을 입력합니다. 스핀들에서 공구의 오버행 길이를 밀리미터 단위로 입력하세요.
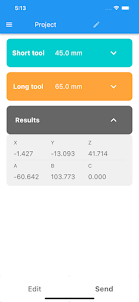
"계산"을 클릭하세요
도구 위치에 대한 데이터를 MachineMaker 2.0으로 자동 전송하는 앱입니다.
로봇 교정은 다음 유형의 로봇에 대한 TCP 교정을 지원합니다.
- 화낙
- 쿠카
- 토르마크
- 보룬테
- CRP
- 덴소
- 두봇
- 에스툰
- 하이윈
- 현대
- 모토맨
- 뉴커
- 마누텍
- 나치
- OTC 다이헨
- 토리노
작동 방식:
- MachineMacker 2.0에서 QR 코드를 스캔하여 앱을 프로젝트와 연결하세요.
- 로봇의 TCP 데이터를 수집합니다. 먼저 짧은 도구를 사용한 다음 긴 도구를 사용합니다.
- XYZ 판독값을 입력합니다. 스핀들에서 공구의 오버행 길이를 밀리미터 단위로 입력하세요.
"계산"을 클릭하세요
더 보기